OPTICAL FLOW & LIDAR SENSOR 3901-L0X
¥4,500
SOLD OUT
仕様
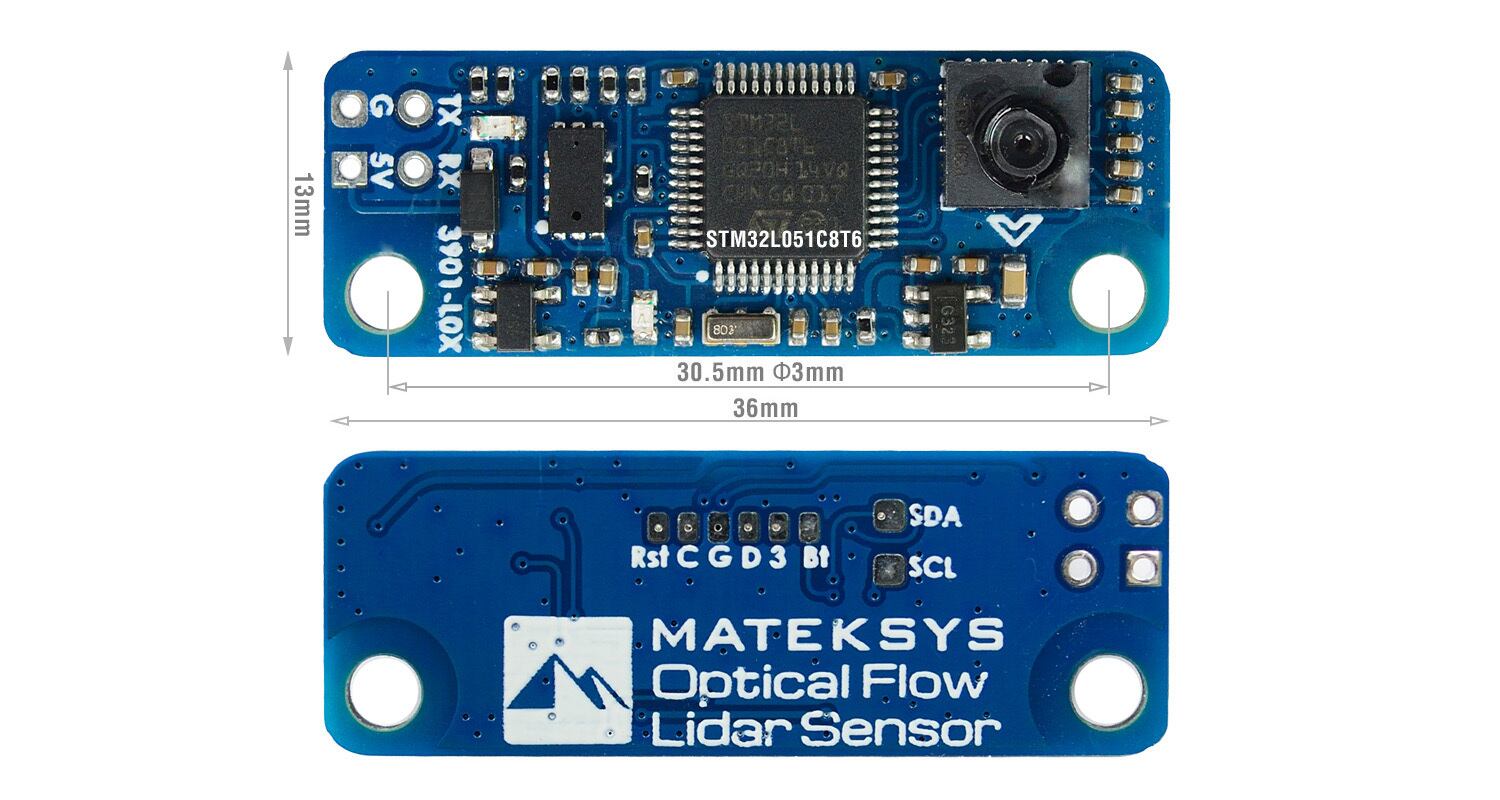
オプティカルフロー:PMW3901
Lidar:VL53L0X
インターフェイスUART
プロトコル:MSP
動作範囲:8cm〜200cm
視野:42度(PMW3901)、27度(VL53L0X)
最小照明> 60Lux
入力電圧:4.5〜5.5V
消費電力:40mA
サイズ:36 * 12mm(F051バージョン)、2g
サイズ:36 * 13mm(L051バージョン)2g
パッキング
モジュール3901-L0X、1個
チップ
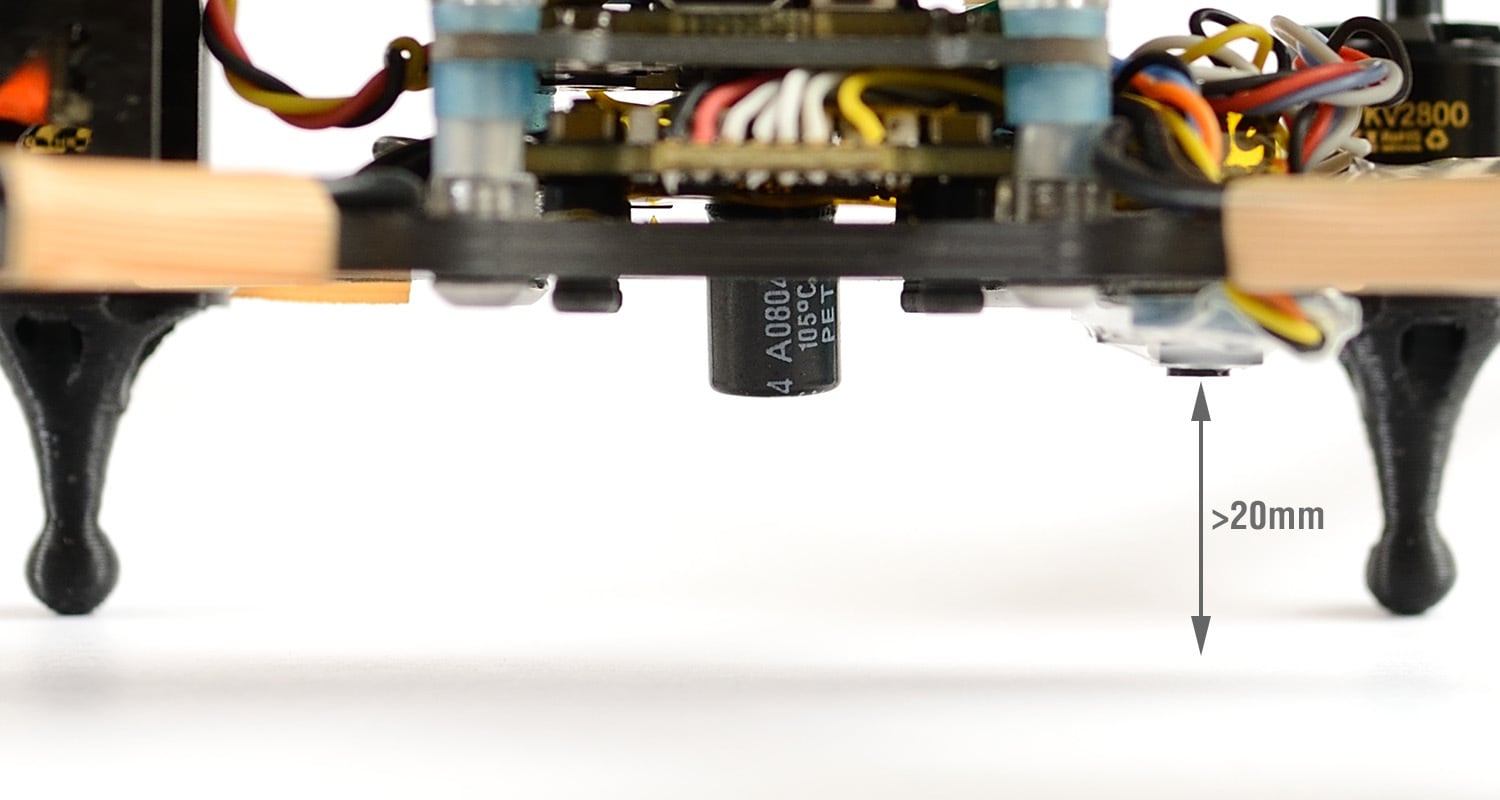
FCの起動中にオプティカルフローを初期化するために、オプティカルフローレンズが2cmを超えて接地されていることを確認してください。
VL53L0Xの最大範囲は2mで、VL53L0Xが有効になっている場合、高度は0〜2m @スロットル0〜100%を保持します。
FCの未使用のUARTはそれをサポートします
ソナー接続(Trig&Echo)は実装されていません
フライトコントローラーで気圧計が検出されていない場合、[モード]タブで[NAVALTHOLD]を選択することはできません。
ArduPilotの最新ファームウェアはSep.02以降MSPプロトコルをサポートしています
SERIALn_PROTOCOL = 32、「n」はArduPilot hwdefのUARTのシリアル番号であり、FCUART番号ではありません。 一部のフライトコントローラーでは、serial1がUART1と等しくないため、各UARTに対応するシリアル番号を取得するためのFlsチェックアウトFCマニュアルがあります。
SERIAL_BAUD = 115
RNGFND_TYPE = 32
FLOW_TYPE = 7
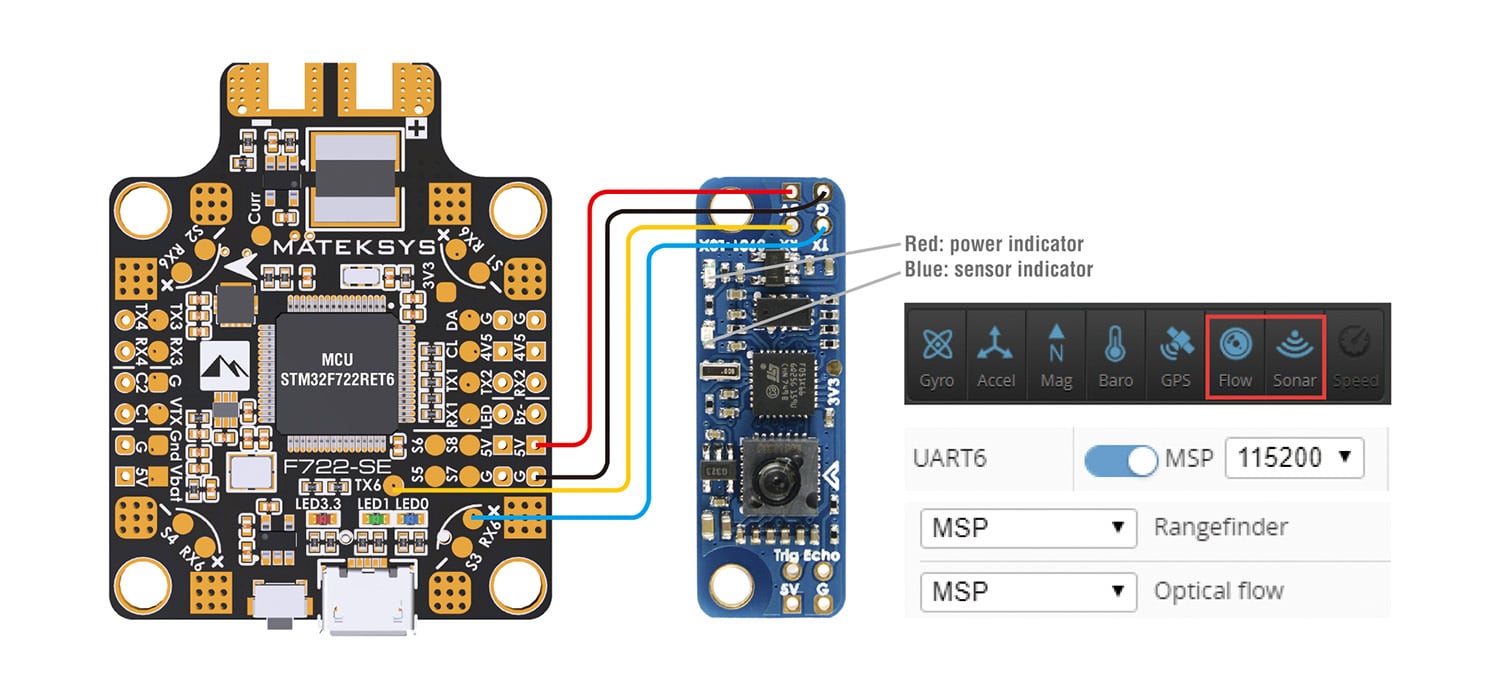
INAVおよびArduPilotでサポートされているUARTMSPV2プロトコルを介した3901-L0Xモジュールとフライトコントローラー間の通信。
MSPV2プロトコルの詳細なデータシートはありません。
plsはINAVとArduPilotGithubのコードを参照します
https://github.com/iNavFlight/inav/wiki/MSP-V2
https://github.com/ArduPilot/ardupilot/blob/master/libraries/AP_MSP/msp.cpp
-
レビュー
(12)
- レビュー(12)